Divya Shah
Divya Shah
Home
Projects
Publications
Talks
Contact
Light
Dark
Automatic
rapid prototyping
Design for Dexterity
Robot design for dexterous manipulaiton.
Video
Thesis
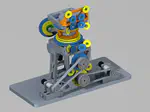
Constant Length Tendon Routing Mechanism through Axial Joint
Tendon-driven mechanisms are gaining popularity in developing light weight, backdrivable robots for widespread use in safe human-robot …
Divya Shah, Ph.D.
,
Alberto Parmiggiani
,
Yong-Jae Kim
Cite
Project
Video
DOI
Web
Visiting Researcher
Design of Constant Length Tendon Routing Mechanism through Axial Joint.
Video
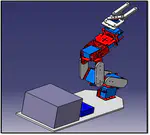
Undergrad Project
Design, Fabrication and Control of an Articulated Robotic Arm.
Thesis
Cite
×