Comparison of Workspace Analysis for Different Spherical Parallel Mechanisms
 Spherical Parallel Mechanisms
Spherical Parallel MechanismsAbstract
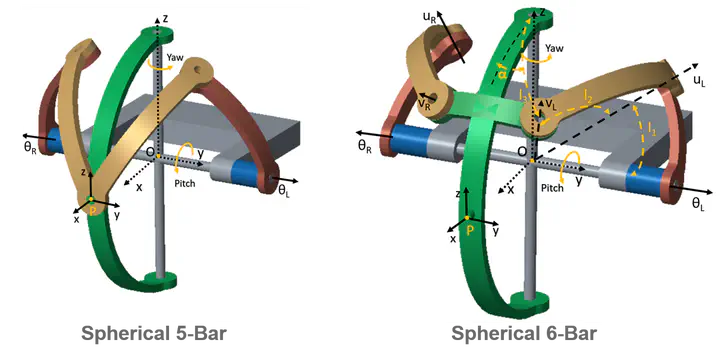
In order to reduce the share of the motive power required to drive the robot’s links, with the aim of increasing its payload-to- weight ratio, this article studies the best way to relocate the actuators (inertial load) but not complicate the joint kinematics. For this, several Parallel Kinematic Mechanisms (PKMs) were considered, namely a 4-UU mechanism, a spherical 5-bar mechanism and a spherical 6-bar mechanism, with gimbal-like rotations. Computer-Aided Design (CAD) modelling and simulations exploring the workspaces for each of these mechanisms was performed. The complete workspace and isotropy analyses comparing these mechanisms to a gimbal system are presented. The general observations suggest that these mechanisms posses a non-uniform workspace with a “warping” behaviour. However, the spherical six bar mechanism proves to be the best solution so far with isotropy nearly >= 0.9 throughout its workspace.
Divya Shah, Ph.D.
Postdoctoral Reseracher in Robot Design & Development
My research interests include humanoid robots, mechatronics, design & development, mechanism theory, parallel kinematics and additive manufacturing.