Towards design and development of new joint modules for humanoid ergoCub 2.0*
 Proposed Joint Module
Proposed Joint ModuleAbstract
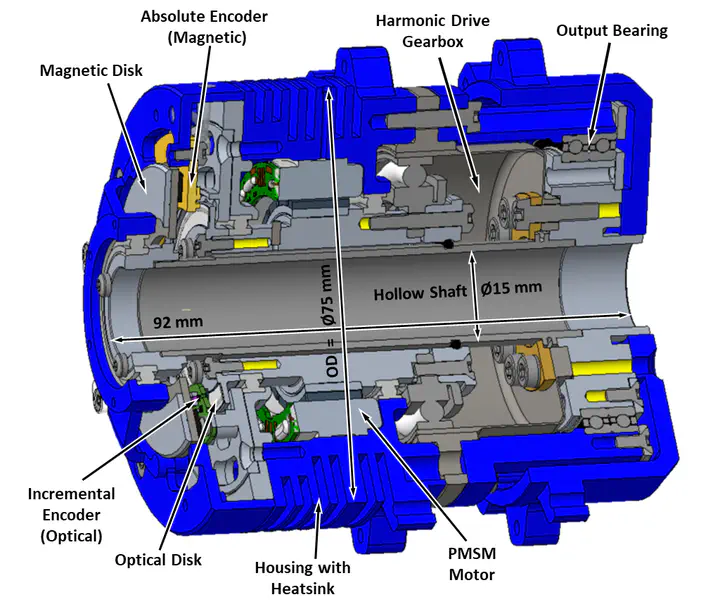
The cases of musculoskeletal diseases in workplaces like industrial warehouses and healthcare units is rapidly increasing. The ergoCub project aims to introduce a new humanoid robot platform for ergonomic human-robot collaborations in such workplaces in order to mitigate the risks on the health of the workers. This article presents the mechanical design and development of a new compact and powerful joint module for the forthcoming version of ergoCub 2.0. The proposed joint achieves continuous torque of 40.5 N m, repeatable peak torque of 77.5 N m, thus increasing the torque density by 163% and the power density by 61% as compared to the current joints. Additionally, the digital twin of the joint is presented and the simulations for sensorless torque estimation are demonstrated.
Divya Shah, Ph.D.
Postdoctoral Reseracher in Robot Design & Development
My research interests include humanoid robots, mechatronics, design & development, mechanism theory, parallel kinematics and additive manufacturing.