 Tendon Routing Mechanism
Tendon Routing MechanismAbstract
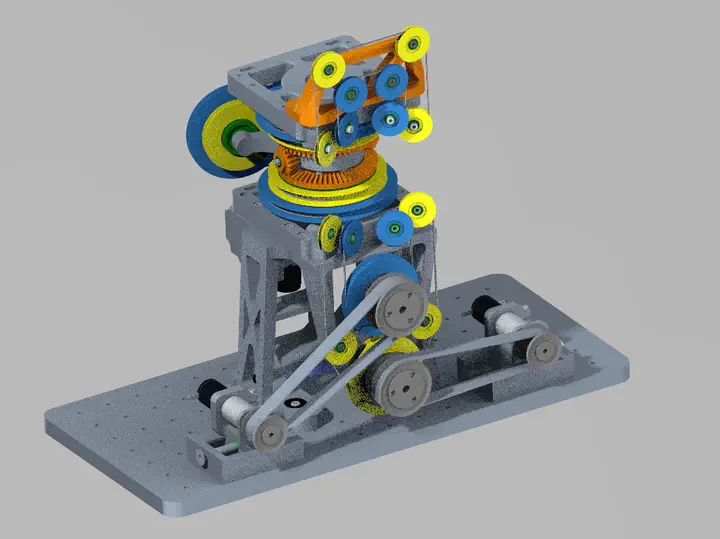
Tendon-driven mechanisms are gaining popularity in developing light weight, backdrivable robots for widespread use in safe human-robot collaborations. For such robots, appropriate tendon routing is essential to avoid any kinematic couplings. This article talks about the concept design and development of a novel tendon routing mechanism for 4 tendons simultaneously through a 1 degree of freedom rotational axial joint (pronation-supination motion of the forearm). The mechanism employs the idea of a moving pulley to achieve constant length for the tendons between the fixed and moving parts, thus resulting in fully decoupled motions. A prototype model and it’s validation are also presented.
Divya Shah, Ph.D.
Postdoctoral Reseracher in Robot Design & Development
My research interests include humanoid robots, mechatronics, design & development, mechanism theory, parallel kinematics and additive manufacturing.