 Parallel Compliant Mechanism
Parallel Compliant MechanismAbstract
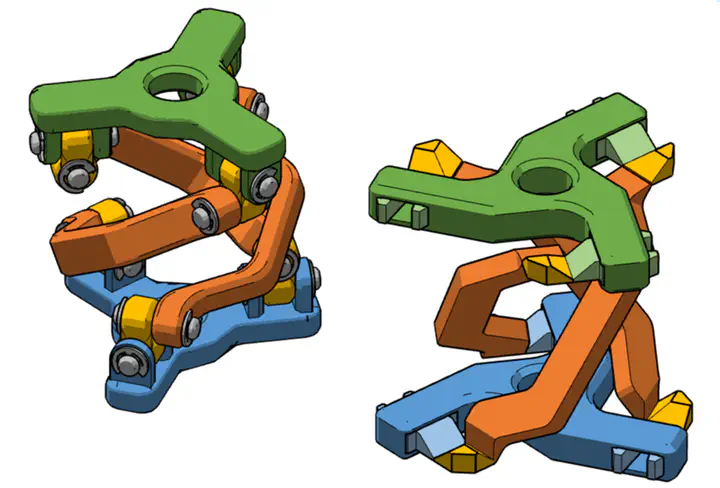
The manufacturing and assembly of small parallel mechanisms are often complex because of the required tolerances and high part count. The present work focuses on the use of additively manufactured compliant mechanisms to overcome some of these difficulties. As a reference, this work considers a recent work on a two degrees of freedom parallel orientational mechanism. Several aspects related to the design and manufacturing of this type of small-scale system are addressed by considering two implementations of the mechanism, one developed following a “traditional” approach with linkages and pin joints, and the other developed following a “flexible” approach using additively manufactured flexures. The two versions of the mechanism are finally compared to provide qualitative and quantitative indications of their motion precision and capacity to withstand loads.
Divya Shah, Ph.D.
Postdoctoral Reseracher in Robot Design & Development
My research interests include humanoid robots, mechatronics, design & development, mechanism theory, parallel kinematics and additive manufacturing.