Computer-Aided Design and Optimization of a Redundant Robotic System for Automated Fiber Placement Process
 Workcell CAD
Workcell CADAbstract
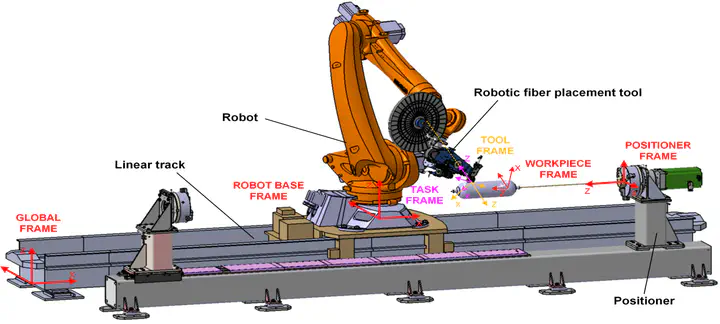
This paper proposes a comprehensive methodology for the computer-aided design and optimization of a robotic workcell for the automated fiber placement. The robotic cell, comprising of a 6-axis industrial manipulator and an actuated positioner, is kinematically redundant with respect to the considered task. An efficient optimization technique for managing these kinematic redundancies is proposed. The robot/positioner motion planning and robotic cell layout design in a CAD environment are presented. To confirm validity of the developed methodology, experimental results are presented that deal with automation of thermoplastic fiber placement process.
Divya Shah, Ph.D.
Postdoctoral Reseracher in Robot Design & Development
My research interests include humanoid robots, mechatronics, design & development, mechanism theory, parallel kinematics and additive manufacturing.