Divya Shah
Divya Shah
Home
Projects
Publications
Talks
Contact
Light
Dark
Automatic
Publications
Type
Conference paper
Journal article
Book section
Thesis
Date
2023
2021
2020
2019
2018
2017
Towards design and development of new joint modules for humanoid ergoCub 2.0*
The cases of musculoskeletal diseases in workplaces like industrial warehouses and healthcare units is rapidly increasing. The ergoCub …
Divya Shah, Ph.D.
,
Marcello Savoldi
,
Alessandro Scalzo
,
Andrea Mura
,
Jacopo Losi
,
Valentina Gaggero
,
Luca Fiorio
,
Marco Maggiali
Cite
Project
Poster
DOI
Web
Fabrication of Parallel Compliant Mechanisms via Additive Manufacturing
The manufacturing and assembly of small parallel mechanisms are often complex because of the required tolerances and high part count. …
Divya Shah, Ph.D.
,
Giovanni Berselli
,
Alberto Parmiggiani
Cite
Project
DOI
Web
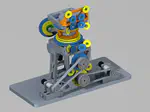
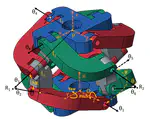
Design of Wrist and Forearm Mechanisms for Enhanced Humanoid Dexterity
The evolution in humanoid robots, aiming for extensive human-robot co-existence and collaboration, calls for an enhancement in the …
Divya Shah, Ph.D.
PDF
Cite
Project
Project
DOI
Web
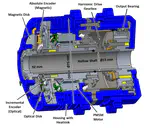
Constant Length Tendon Routing Mechanism through Axial Joint
Tendon-driven mechanisms are gaining popularity in developing light weight, backdrivable robots for widespread use in safe human-robot …
Divya Shah, Ph.D.
,
Alberto Parmiggiani
,
Yong-Jae Kim
Cite
Project
Video
DOI
Web
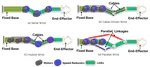
A Comparison of Robot Wrist Implementations for the iCub Humanoid
This article provides a detailed comparative analysis of five orientational, two degrees of freedom (DOF), mechanisms whose envisioned …
Divya Shah, Ph.D.
,
Yuanqing Wu
,
Alessandro Scalzo
,
Giorgio Metta
,
Alberto Parmiggiani
Cite
Project
DOI
Web
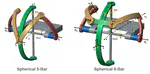
Comparison of Workspace Analysis for Different Spherical Parallel Mechanisms
In order to reduce the share of the motive power required to drive the robot’s links, with the aim of increasing its payload-to- …
Divya Shah, Ph.D.
,
Giorgio Metta
,
Alberto Parmiggiani
Cite
Project
Video
DOI
Web
Workspace Analysis and the Effect of Geometric Parameters on Parallel Mechanisms of the N-UU Class
N-UU class mechanisms, exemplified by the Omni-Wrist III, are compact parallel kinematic mechanisms (PKM) with large singularity free …
Divya Shah, Ph.D.
,
Giorgio Metta
,
Alberto Parmiggiani
Cite
Project
Video
DOI
Web
Detection of bimanual gestures everywhere: why it matters, what we need and what is missing
Bimanual gestures are of the utmost importance for the study of motor coordination in humans and in everyday activities. A reliable …
Divya Shah, Ph.D.
,
Ernesto Denicia
,
Tiago Pimentel
,
Barbara Bruno
,
Fulvio Mastrogiovanni
Cite
DOI
Web
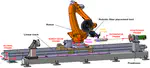
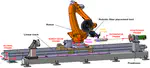
Computer-Aided Design and Optimization of a Redundant Robotic System for Automated Fiber Placement Process
This paper proposes a comprehensive methodology for the computer-aided design and optimization of a robotic workcell for the automated …
Divya Shah, Ph.D.
,
Jiuchun Gao
,
Anatol Pashkevich
,
Stéphane Caro
,
Benoît Courtemanche
Cite
Project
DOI
Web
Increased Productivity of an Automated Tape Winding Process: SPIDE-TP Platform
Composite materials offer attractive properties compared to the traditional structural materials, such as high strength-to-weight …
Divya Shah, Ph.D.
PDF
Cite
Project
Cite
×