 iCub (Image credit: iCubTech)
iCub (Image credit: iCubTech)Robot Design for Dexterous Manipulation
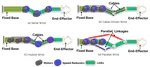
This research project is a part of the Ph.D. with Dipartimento di Informatica, Bioingegneria, Robtoica e Ingegneria dei Sistemi (DIBRIS) at the Università degli Studi di Genova and in affiliation with the iCub Tech at the Istituto Italiano di Tecnologia in Genova, Italy. The Ph.D. thesis is aimed towards design of a new wrist for the iCub humanoid with enhanced manipulation dexterity. The main focus here is the study and implementation of parallel orientational mechanisms.
Objectives
- To study and investigate the state-of-the-art in design for wrist dexterity.
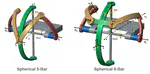
- To adapt and analyze some of the most promising architectures from the literature.
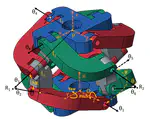
- To propose a novel kinematic design for the wrist with enhanced dexterity.
- To test and develop the proposed mechanism.
Supervisors
- Alberto Parmiggiani; Technologist & Facility Coordinator, Istituto Italiano di Tecnologia
- Giorgio Metta; Scientific Director, Istituto Italiano di Tecnologia
Also check out the project of visiting-researcher, which was a part of the doctoral program.
Divya Shah, Ph.D.
Postdoctoral Reseracher in Robot Design & Development
My research interests include humanoid robots, mechatronics, design & development, mechanism theory, parallel kinematics and additive manufacturing.