Divya Shah
Divya Shah
Home
Projects
Publications
Talks
Contact
Light
Dark
Automatic
Projects
Ergocub
Design and development of humanoid joint modules for human-robot interactions in warehouse.
Web
Design for Dexterity
Robot design for dexterous manipulaiton.
Video
Thesis
Visiting Researcher
Design of Constant Length Tendon Routing Mechanism through Axial Joint.
Video
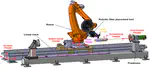
Optimization for Productivity
Increased Productivity of an Automated Tape Winding System - SPIDE TP Platform
Poster
Slides
Thesis
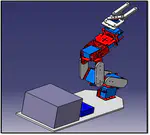
Undergrad Project
Design, Fabrication and Control of an Articulated Robotic Arm.
Thesis
Cite
×