Divya Shah, Ph.D.
Postdoctoral Reseracher in Robot Design & Development
Italian Institute of Technology
I am a postdoctoral researcher with the iCub Tech facility at the Istituto Italiano di Tecnologia (IIT), currently working on the mechatronic design and development of compact and powerful humanoid joint modules for the ergoCub project aiming for human-robot collaborations for risk prevention in warehouse and medical scenarios.
Short Bio
I am an Indian, born and raised in Mumbai. I received Bachelor of Technology in Mechanical Engineering from Sardar Patel College of Engineering affiliated to Mumbai University in 2015. My active involvement with the collegiate robotics club during my undergrad, aspired me to pursue higher education in robotics.
I then moved to Europe for the Erasmus joint masters programme European Masters on Advanced Robotics (EMARO+) and graduated with double Master degrees from Università degli Studi di Genova, Italy and École Centrale de Nantes, France in 2017. For my graduate thesis, I Collaborated with an industrial R&D team on CAD simulation and optimization of a redundant robotic workcell for automated fiber placement process to increase the productivity.
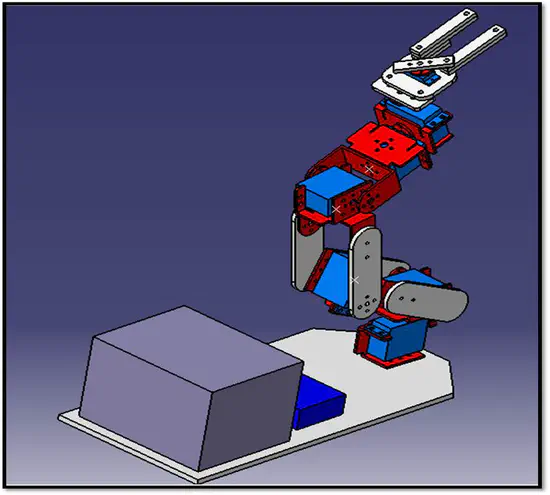
I then moved back to Italy for my doctorate program with iCub Tech at the Istituto Italiano di Tecnologia (IIT) and Dipartimento di Informatica, Bioingegneria, Robotica e Ingegneria dei Sistemi (DIBRIS) at Università degli Studi di Genova, Italy. My doctoral research focused on design of wrist and forearm mechanisms, emphasizing on parallel kinematics and tendon-driven mechanisms, for enhancing manipulation dexterity of humanoid robots. I successfully defended my thesis and obtained a PhD in bioengineering and robotics with focus on advanced and humanoid robots in 2021.
My leisure time interests are, to learn and practice swing dancing and playing ukulele!
What’s New
Experience
Mechatronic design and development of compact and powerful joint modules for the ergoCub humanoid robot. Responsibilities include:
- Mechanical Design
- Simulation and Analysis
- Rapid Prototyping
- Testing and Development
Concept design and analyses of a new wrist for the iCub humanoid for dexterous manipulation. Responsibilities included:
- Mechanism Theory
- CAD Modelling
- Simulation and Analysis
- Rapid Prototyping
Projects


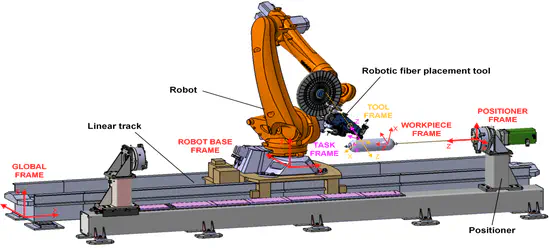
Optimization for Productivity
Increased Productivity of an Automated Tape Winding System - SPIDE TP Platform
Research Interests
Skills
90%
80%
60%
Featured Publications
Featured Talks

Education
Contact
- divyashah.2801@gmail.com
- +39 339 414 3772
- Genova (Italy), 16126